ХОД РАБОТЫ1. Начальные условия Z1=10, Z2=25 1.1 Идеальное реле
Рисунок 3 – Характеристика идеального реле
1.1.1 Без гибкой ОС
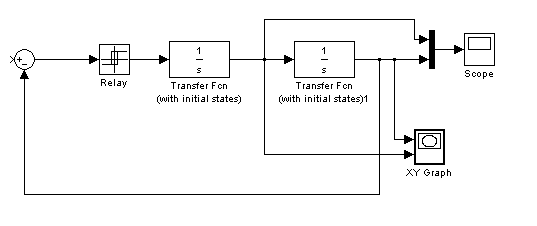
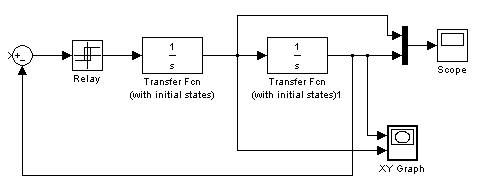
Рисунок 4 – Структурная схема исследуемой системы без гибкой обратной связи
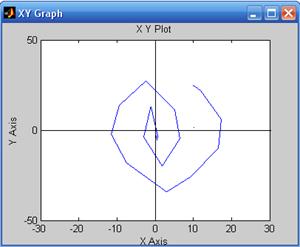
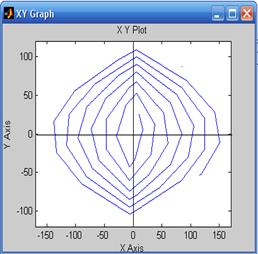
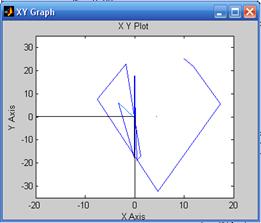
Рисунок 5 – Фазовый портрет релейной САР без гибкой ОС
Из фазового портрета системы видно, что скользящий режим отсутствует, изображающая точка не приходит по линии переключения к началу координат.
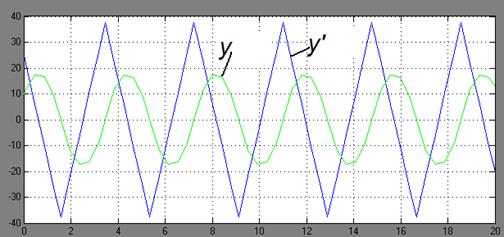
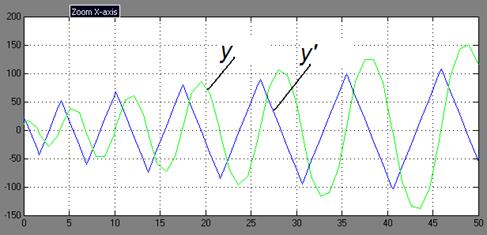
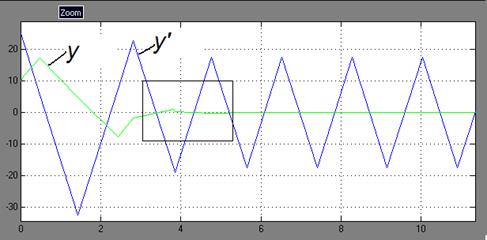
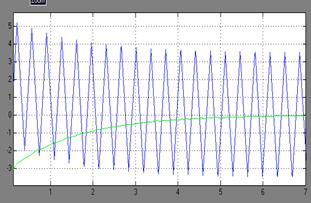
Рисунок 6 – Совмещенный график переходных процессов в релейной САР без гибкой ОС
В системе с жесткой единичной обратной связью присутствуют автоколебания (при заданных начальных условиях и определенных параметрах реле).
1.1.2 С гибкой ОС
Рисунок 7 – Структурная схема исследуемой системы с гибкой обратной связи
Рисунок 8 – Фазовый портрет релейной САР с гибкой ОС
В результате экспериментального исследования системы на модели, мы подобрали такой коэффициент усиления обратной связи Кос=0.09, что в системе начался скользящий режим. Это наглядно доказывает приведенный выше фазовый портрет, из которого видно, что изображающая точка скользит по линии переключения к началу координат, то есть к равновесному состоянию.
1.2 Реле с гистерезисом
Рисунок 9 – Характеристика двухпозиционного реле с положительным гистерезисом
1.2.1 Без гибкой ОС
Рисунок 10 – Структурная схема исследуемой системы без гибкой обратной связи
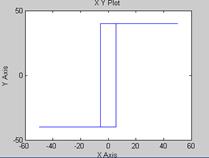
Рисунок 11 – Фазовый портрет релейной САР без гибкой ОС
Анализируя полученный фазовый портрет системы без гибкой обратной связи, сделаем вывод, что в системе скользящий режим не возникает, так как видно, что изображающая точка, при заданных начальных условиях и определенных параметрах релейного элемента, в начало координат не попадает.
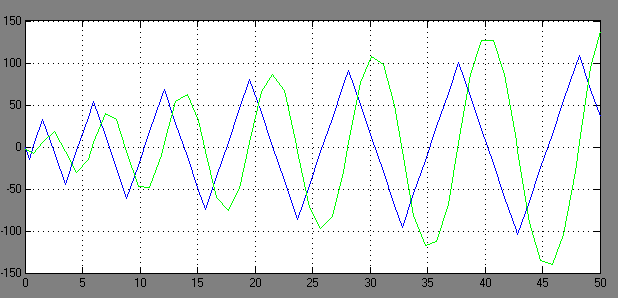
Рисунок 12 – Совмещенный график переходных процессов в релейной САР без гибкой ОС
Переходной процесс в системе расходящийся. За счет имеющейся жесткой единичной обратной связи стабилизации системы не происходит.
1.2.2 С гибкой ОС
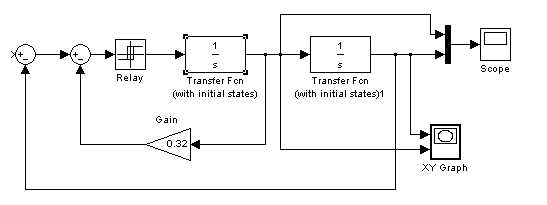
Рисунок 13 – Структурная схема исследуемой системы с гибкой обратной связи
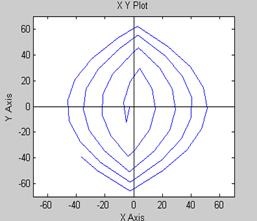
Рисунок 14 – Фазовый портрет релейной САР с гибкой ОС
Экспериментальное исследование системы на модели позволило подобрать такой коэффициент усиления обратной связи Кос=0.32, что в системе начался скользящий режим. Это наглядно доказывает приведенный выше фазовый портрет, из которого видно, что изображающая точка скользит по линии переключения к началу координат, то есть к равновесному состоянию.
Рисунок 15 – Совмещенный график переходных процессов в релейной САР с гибкой ОС
Из графика переходного процесса отчетливо виден отрезок скользящего режима. Согласно проведенным опытам можно сделать вывод, что он тем больше, чем больше коэффициент усиления обратной связи. Таким образом, с помощью введения гибкой обратной связи мы смогли добиться стабилизации автономной релейной системы.
2. Начальные условия Z1=-3, Z2=0 2.1 Идеальное реле 2.1.1 Без гибкой ОС
Рисунок 16 – Фазовый портрет релейной САР без гибкой ОС
Из фазового портрета системы видно, что скользящий режим отсутствует, изображающая точка не приходит по линии переключения к началу координат.
Рисунок 17 – Совмещенный график переходных процессов в релейной САР без гибкой ОС
Из приведенной выше осциллограммы следует, что в системе с жесткой единичной обратной связью присутствуют автоколебания (при заданных начальных условиях и определенных параметрах реле).
2.1.2 С гибкой ОС
Рисунок 18 – Структурная схема исследуемой системы с гибкой обратной связи
Рисунок 19 – Фазовый портрет релейной САР с гибкой ОС
В результате экспериментального исследования системы на модели, мы подобрали такой коэффициент усиления обратной связи Кос=0.09, что в системе начался скользящий режим. Это наглядно доказывает приведенный выше фазовый портрет, из которого видно, что изображающая точка скользит по линии переключения к началу координат, то есть к равновесному состоянию.
2.2 Реле с гистерезисом 2.2.1 Без гибкой ОС
Рисунок 20 – Фазовый портрет релейной САР без гибкой ОС
Полученный фазовый портрет системы без гибкой обратной связи свидетельствует о том, что в системе возникает скользящий режим, так как видно, что изображающая точка, при заданных начальных условиях и определенных параметрах релейного элемента, скользит по линии переключения в начало координат.
Рисунок 21 – Совмещенный график переходных процессов в релейной САР без гибкой ОС
За счет имеющейся жесткой единичной обратной связи стабилизации системы не происходит. Переходной процесс в системе расходящийся. 2.2.2 С гибкой ОС
Рисунок 22 – Структурная схема исследуемой системы с гибкой обратной связи
Рисунок 23 – Фазовый портрет Рисунок 24 – Фазовый портрет релейной САР с гибкой ОС релейной САР с гибкой ОС при Кос=0.05 при Кос=1.6
Рисунок 25 – Совмещенный график Рисунок 26 – Совмещенный график переходных процессов переходных процессов в релейной САР с гибкой ОС в релейной САР с гибкой ОС при Кос=0.05 при Кос=1.6
При Кос=0.05 изображающая точка стремится в начало координат, но переходной процесс в системе расходящийся, а при Кос=1.6 точка скользит по линии переключения к равновесному состоянию в начале координат и переходной процесс в системе сходящийся.
ВЫВОД В исследуемой САР как с идеальным реле, так и с двухпозиционным реле с положительным гистерезисом, скользящий режим наступает только при введении гибкой отрицательной обратной связи, охватывающей релейный элемент и один интегратор. В этом случае изображающая точка на фазовом портрете приходит в начало координат (в равновесное состояние). На графике переходного процесса, имеющего конечную длительность, виден отрезок скользящего режима. Такой отрезок тем больше, чем больше коэффициент усиления обратной связи. Из проведенных опытов видно, что увеличивая коэффициент отрицательной обратной связи, мы все больше приближаемся к скользящему режиму в системе. В системе с жесткой единичной обратной связью и идеальным реле в отсутствие гибкой ООС наблюдались автоколебания, а в системе с гистерезисом без гибкой обратной связи переходной процесс расходился. Таким образом, с помощью введения гибкой обратной связи мы смогли добиться стабилизации автономной релейной системы и добиться ее устойчивости.
|