Проектирование основного механизма и определение закона движения
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту на тему:
«ПРОЕКТИРОВАНИЕ И ДИНАМИЧЕСКОЕ ИССЛЕДОВАНИЕ МЕХАНИЗМОВ СТРОГАЛЬНОГО СТАНКА С ВРАЩАЮЩЕЙСЯ КУЛИСОЙ»
Задание №33 вариант в
Студент: Шадрина К.В. Группа: РК9-52 Руководитель проекта: Сащенко Д.В
Реферат Пояснительная записка к курсовому проекту «Проектирование и исследование механизмов поперечно-строгального станка с качающейся кулисой» содержит страницы машинописного текста, рисунки, таблицы и графики. В пояснительной записке приведено: проектирование основного механизма поперечно-строгального станка, определение закона его движения, кинето-статический силовой расчет основного рычажного механизма, проектирование цилиндрической эвольвентной зубчатой передачи, проектирование двухрядного планетарного редуктора, проектирование кулачкового механизма с качающимся толкателем. Пояснительная записка содержит 38 страниц. В пояснительной записке приведено 19 рисунков, а также 2 таблицы.
Содержание Техническое задание………………………………………………………………...…4 Исходные данные…………………………………………………………...………….7 1. Проектирование основного механизма и определение закона движения…….….9 1.1 Проектирование механизма по заданным условиям…………………….……….9 1.2. Построение графиков аналогов скоростей ……………………………………12 1.3 Выбор динамической модели……………………………………………………14 1.4 Определение приведенного момента сил сопротивления, в зависимости от положения кривошипа…………………………………………………...…….. ……14 1.5 Определение приведенного момента движущих сил………………………..….15 1.6. Суммарная работа………………………………………………………………..16 1.7. График переменных приведенных моментов инерции II группы звеньев…....17 1.8 График кинетической энергии ТII(φ11) II группы звеньев………………………18 1.9 График изменения кинетической энергии первой группы звеньев ТI (φ1)…...19 1.10Определение необходимого момента инерции маховых масс IIпр ………...….20 1.11Момент инерции дополнительной маховой массы Iдоп………………………....20 1.12 График (приближенный) угловой скорости 2. Силовой расчет механизма………………………………………………………...21 2.1. Исходные данные для силового расчёта механизма………………………..……21 2.2 Определение углового ускорения звена приведения…………………….……..22 2.3 Построение планов скоростей и ускорений…………………………………….22 2.4 Определение главных векторов и главных моментов сил инерции…………...23 2.5 Кинетостатический силовой расчет механизма…………………………….......24 3.Проектирование зубчатой передачи………………………………………………25 3.1 Исходные данные…………………………………………………………………25 3.2 Геометрический расчет эвольвентной зубчатой передачи…………….……….25 3.3 Качественные показатели……………………………………………………...…27 3.4 Построение графика качественных показателей. Таблица выбранных параметров…………………………………………………………………….… …..28 3.5 Построение станочного зацепления………………………………………….….29 3.6 Построение проектируемой зубчатой передачи…………………………...……30 3.7 Расчет планетарного редуктора…………………………………………….……31 4.Проектирование кулачкового механизма с поступательно движущимся толкателем………………………………………………………………………….….32 4.1 Исходные данные……………………………………………………………..…..32 4.2 Построение графиков скорости, ускорения и перемещения толкателя…….…33 4.3 Определение основных размеров кулачкового механизма…………….………35 4.4 Построение профиля кулачка…………………………………………….………35 Заключение…………………………………………………………………………….37 Список литературы…………………………….……………………………………..38
Техническое задание ПРОЕКТИРОВАНИЕ И ДИНАМИЧЕСКОЕ ИССЛЕДОВАНИЕ МЕХАНИЗМОВ СТРОГАЛЬНОГО СТАНКА С ВРАЩАЮЩЕЙСЯ КУЛИСОЙ
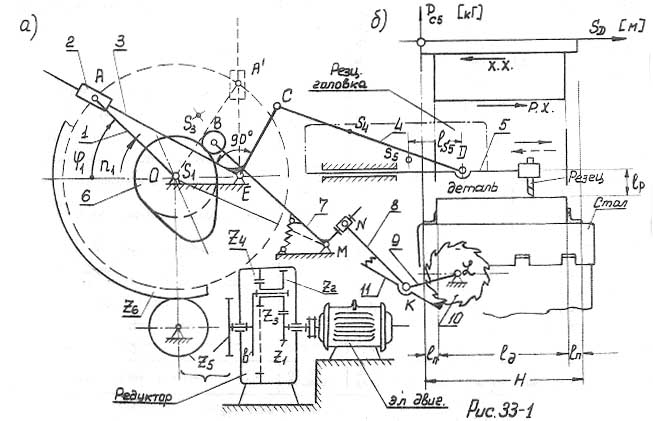
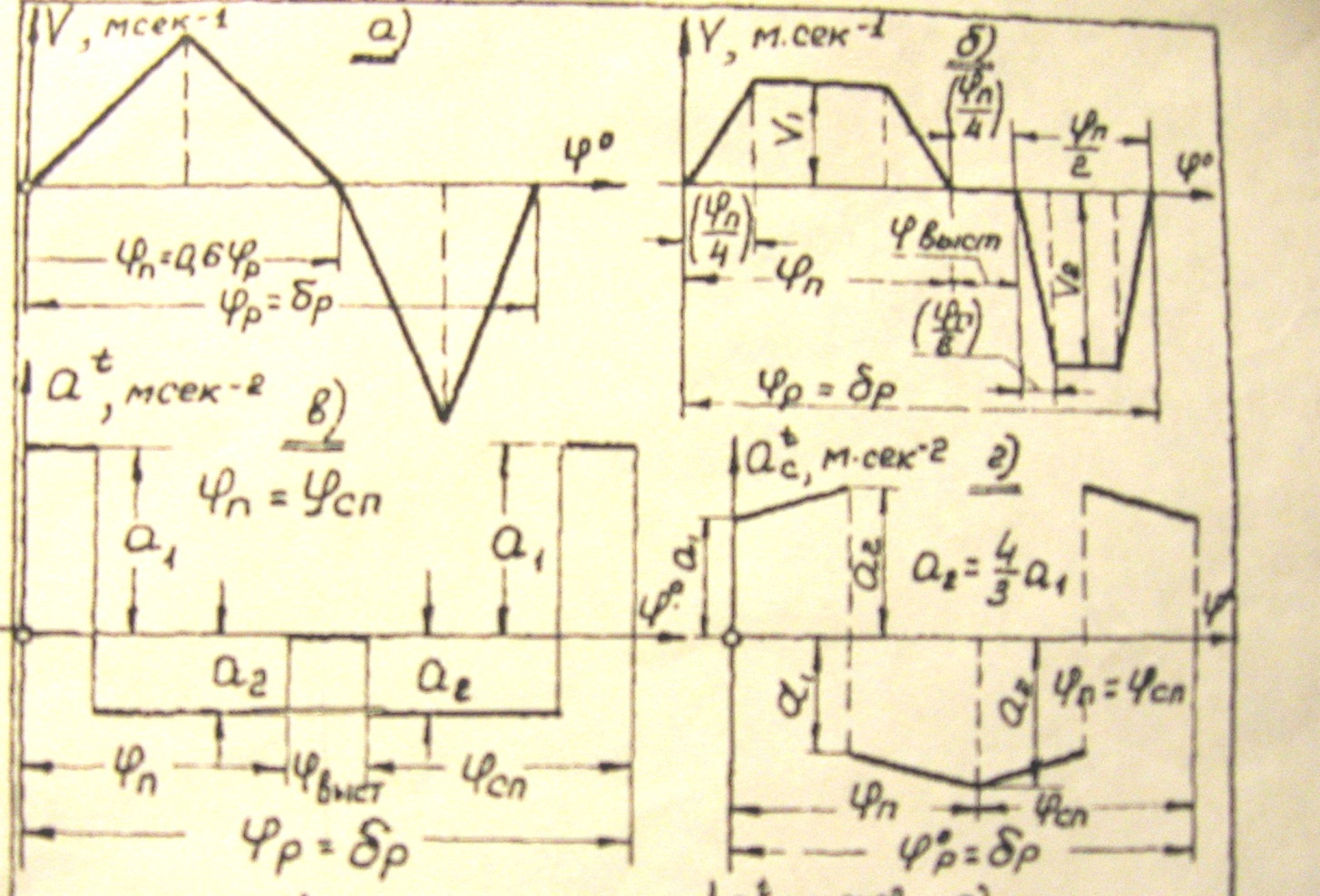
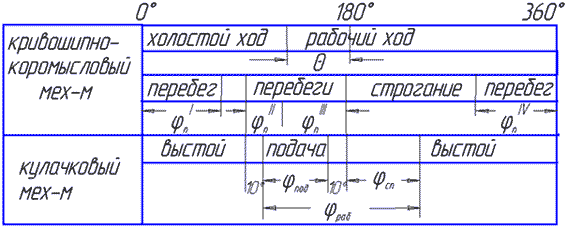
Строгальный станок предназначен для строгания плоских поверхностей. Привод станка состоит из электродвигателя планетарного редуктора и зубчатой передачи (Z5, Z6) (рис. 1). Резание материала производится резцом, закрепленным в резцовой головке, совершающей возвратно-поступательное движение. Для движения резца, укрепленного в суппорте ползуна 5,используется шестизвенный кривошипно-кулисный механизм, состоящий из кривошипа 1, кулисного ползуна 2, вращающейся кулисы 3, шатуна 4, ползуна 5. Силы сопротивления, приложенные к звену 5,показаны в виде диаграммы (PC5, SD) на рис.1. Ход Н ползуна 5 выбирается л зависимости от длины обрабатываемой детали lД с учетом длины перебегов резца lП в начале и в конце рабочего хода. Средняя скорость резания VРЕЗ выбирается в зависимости от условий обработки. Во время перебегов в конце холостого и в начале рабочего ходов осуществляется перемещение стола (на котором закрепляется обрабатываемая деталь) с помощью ходового винта на величину поперечной подачи (на рис.1 не показано).Поворот этого винта производится посредством кулачкового механизма, состоящего из кулачка 6 и коромыслового толкателя 7, а также храпового механизма, состоящего из звеньев 8 и 9, храпового колоса 10 и собачки 11. Кулачок 6 закреплен на одном валу с кривошипом 1. Регулирование подачи стола производится изменением количества зубьев, захватываемых собачкой 11. При проектировании кулачкового механизма необходимо обеспечить заданный закон изменения ускорений точки В толкателя (рис. 2 в) и осуществить подачу резца за время его перебегов в соответствии с циклограммой работы механизмов (рис.3) строгального станка.
Рис. 1.а) Кинематическая схема кривошипно-кулисного и кулачкового механизмов. б)Диаграмма сил сопротивления
Рис. 2. Законы изменения ускорения толкателя кулачкового механизма для вариантов А, Б, В, Г.
Рис. 3. Циклограмма работы механизмов станка.
Исходные данные. Таблица 1.
Проектирование основного механизма и определение закона движения
|

 ………………………….…..20
………………………….…..20