Ключевые слова. 62. Альбедиль М.Ф. Индуизм: творящие ритмыКлючевые слова Моторы Управления двигателем и некоторые доработки команд.
Эта команда регулирует мощность NXT двигателя. NXT имеет 3 выхода на двигатели: motorA, motorB и motorC. NXT поддерживает уровни мощности от -100 (полный назад) до 100 (полный вперед). Уровень мощности равный нулю приведет к остановке двигателя.
Эта команда отвечает за синхронизацию двигателей, т.е. устанавливает зависимость между двумя двигателями.
Всего существует 6 типов зависимостей: synchAB, synchAC, synchBA, synchBC, synchCA, и synchCB. Первая буква после synch – это обозначение «мастер» двигателя, а 2-я буква – обозначение подчиненного двигателя.
Эта строка кода устанавливает связь между двигателями в команде nSyncedMotors. Процентный диапазон значений: от -100 до 100. При -100 двигатель прямо противоположен "Мастер" двигателю, а при 100 прекрасно имитирует его.
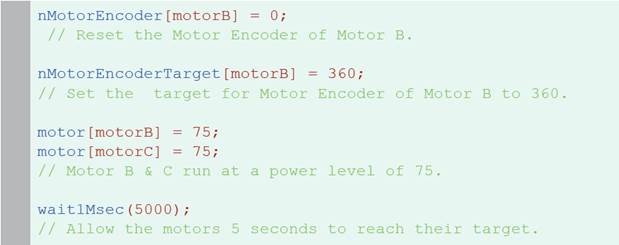
Этот код используется для доступа к внутренним датчикам двигателей NXT. Эта команда возвращает значение, равное количеству оборотов, совершаемых двигателем.
Вы можете присвоить двигателю определенную сумму с помощью переменной nMotorEncoderTarget []. Она указывает на количество датчиков необходимых для движения. Если вы укажете положительное значение, то двигатель будет замедляться до полной остановки на этой позиции. Отрицательное значение оставят двигатель в режиме ожидания, когда датчик достигнет положения.
Таймеры NXT позволяет использовать команды ожидания для установки задержек в вашей программе. Он также поддерживает таймеры, которые работают как секундомер. Они отсчитывают время, и могут быть сброшены, когда вы хотите запустить или перезапустить отслеживание времени.
Данный код заставляет робота ждать указанное число миллисекунд до выполнения следующей команды в программе. "WAIT_TIME"; - целое значение (где 1 = 1/1000-ая секунды). Максимальное значение WAIT_TIME = 32768ms, или 32.768 секунды.
Данный код заставляет робота ждать указанное число сотых долей секунды до выполнения следующей команды в программе. "WAIT_TIME"; - целое значение (где 1 = 1/100-й секунды). Максимальное значение WAIT _ TIME = 32768, или 327.68 секунды.
Этот код возвращает целое значение, равное текущему значению таймера. Значение " time1 " в миллисекундах (1 = 1/1000-ая секунды). Максимальное количество времени - это 32.768 секунды (1/2 минуты). NXT использует 4 таймера: T1, T2, T3, и T4
Аналогично предыдущему, только здесь значение в сотых (1 = 1/100-й секунды). Максимальное значение - 327.68 секунды (~5.5 минуты). Также используются 4 таймера…
Аналогично предыдущим двум командам. Значение в десятых (1 = 1/10-я секунды). Максимальное время - 3276.8 секунды (~54 минуты).
Сбрасывает указанный таймер в ноль. NXT имеет 4 внутренних таймера: T1, T2, T3, и T4.
Датчики
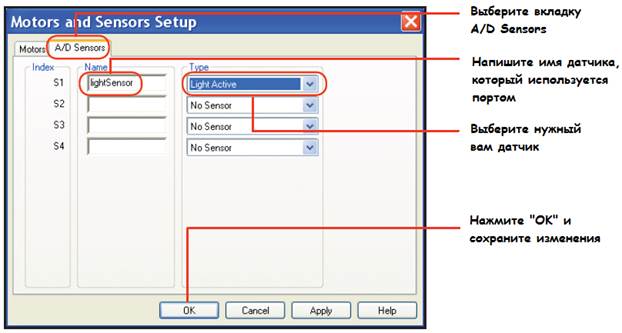
“Motors and sensors setup” – один из ключевых пунктов среды RobotC. В этом подразделе меню Robot осуществляется конфигурирование всех устройств, подключенных к микроконтроллеру.
После в программном коде появится строчка: #pragma config(Sensor, S1, lightSensor, sensorLightActive) //*!!Code automatically generated by 'ROBOTC' configuration wizard!!*//
Вот пример программы с сенсорами: #pragma config(Sensor, S1, lightSensor, sensorLightActive) #pragma config(Motor, motorA, Lmotor, tmotorNormal, PIDControl) #pragma config(Motor, motorB, Rmotor, tmotorNormal, PIDControl) //*!!Code automatically generated by 'ROBOTC' configuration wizard!!*//
task main{ while (SensorValue[lightSensor]>100){ motor[LMotor]=100; motor[RMotor]=100; } } В этой программе четко указано, какой мотор на какой порт следует подключать: левый LMotor –на порт A, а RMotor – на порт B.
Световой датчик Датчик освещенности используется для отслеживания линии. Весь фокус в том, чтобы робот перемещался вдоль линии и всегда стремился к краю линии. Для этого примера мы будем использовать левый край. Если видим темную поверхность, то это означает, что вы находитесь на вершине, и край будет слева от вас. Таким образом, вы двигаетесь к краю, идя вперед и налево. А если сделать то же самое, только со светлой поверхностью и зациклить эти 2 функции, то робот будет ехать вдоль линии.
Вот простейший пример использования светового датчика: task main() { while(1==1{ //бесконечный цикл while(SensorValue(lightSensor) < 45){//если освещенность меньше… motor[motorC] = 0; motor[motorB] = 80; } while(SensorValue(lightSensor) >= 45){//если освещенность больше… motor[motorC] = 80; motor[motorB] = 0; }
Датчик касания Датчик касания позволяет роботу «хватать» предметы, а также реагировать на соприкосновение со стеной.
Вот как будет выглядеть код с применением этого датчика:
const tSensors touchSensor = (tSensors) S2; task main(){ while(true){ if(SensorValue(touchSensor)==0){ motor[motorC]=100; motor[motorB]=100; } else{ motor[motorC]=100; motor[motorB]=-100; wait1Msec(1500); } } } Мы используем условие "ехать вперед, пока не нажата кнопка". Это условие будет истинным, когда SensorValue (touchSensor) равно 0. Как только это условие нарушается, робот совершает поворот.
Звуковой сенсор Звуковой датчик является последним из стандартных датчиков NXT. По сути, это своего рода микрофон, который чувствует амплитуду (как громкий или мягкий звук).
Вот пример использования звукового датчика:
task main(){ motor[motorC] = SensorValue(soundSensor); motor[motorB] = SensorValue(soundSensor); wait1Msec(10000); } Здесь SensorValue(soundSensor) является числом. В зависимости от громкости звука он установит значение от 0 до 100.
Ультразвуковой сенсор Роботы точные, надежные, умные машины, но только тогда, когда они запрограммированы как надо и реагируют соответствующим образом. Используя датчик, который может определять препятствия только при контакте, имеет свои недостатки. Мы предпочли бы не сталкиваться с чем-то и знать заранее, что есть препятствие. Для этого и используют ультразвуковой сенсор.
Пример работы робота с ультразвуковым сенсором:
const tSensors sonarSensor = (tSensors) S1;
|