STEPPER MOTORSStepper motors are useful wherever accurate control of movement is required. They are used extensively in robotics and in printers, plotters and computer disk drives, all of which require precise positioning or speed. In a plotter, for example, by using two motors running at 90 degrees to each other, they can be used to drive a pen an exact distance in all directions. In robotics, they are used to position manipulators exactly where required.
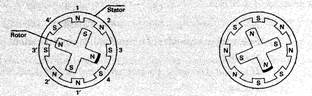
Fig. 1a Fig. 1b The rotor in a stepper motor is constructed from several permanent magnets with north and south poles. The stator is wound into a series of electromagnets, usually four, which can be switched on and off. Figs. 1a and b illustrate the operation of a permanent magnet-type stepper motor. When current is applied to the stator coils, it creates the pole arrangement shown in Fig. 1a. Poles 1 and 2 are north. Hence, the rotor south pole is attracted to both of them and settles in the mid position as shown. When the stator currents are changed to produce the pole arrangement shown in Fig. 1b, pole 1 has south polarity. This repels the rotor which moves to the new position as shown. Each polarity change on the stator causes the rotor to move (in this case) 45 degrees. Stepper motors can be divided into two groups. The first one works without a permanent magnet. The second one has a permanent magnet, usually located on the rotor. Variable reluctance motors form the first group. As there is no permanent magnet, the variable reluctance motor has practically no detent torque. The rotor spins freely and gives good acceleration and high speed if lightly loaded. Applications include micropositioning tables. The second group comprises the permanent magnet motor, the hybrid motor, and the disc magnet motor. The permanent magnet type offers high dynamic torque at low speed and large step angles. This is a low cost motor used extensively in low inertia applications such as computer peripherals and printers. The hybrid type combines features of both types mentioned above. It has good speed/torque characteristics and micro-stepping capability. Steps of 1.8 degrees are possible. Disc magnet motors can be made very small and are very efficient. One of their first applications was in quartz-controlled watches.
|
 A stepper motor does not run in the same way as a normal DC motor, i.e. continuously rotating. Instead, it runs in a series of measured steps. These steps are triggered by pulses from a computer, each pulse making the motor turn either in a forward or a reverse direction by an exact interval, typically 1.8, 2.5, 3.75, 7.5, 15, or 30 degrees. Accuracy is within 3% to 5% of the last step.
A stepper motor does not run in the same way as a normal DC motor, i.e. continuously rotating. Instead, it runs in a series of measured steps. These steps are triggered by pulses from a computer, each pulse making the motor turn either in a forward or a reverse direction by an exact interval, typically 1.8, 2.5, 3.75, 7.5, 15, or 30 degrees. Accuracy is within 3% to 5% of the last step.