
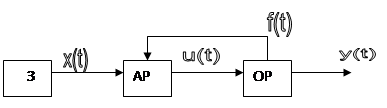
Принцип регулирования по возмущению. (Принцип компенсации).АСР по возмущению работает по разомкнутому циклу, т.е. не имеет обратной связи.
Регулирующее воздействие формируется как функция от возмущения: U(t)=F [ f(t) ]
Достоинство: 1. Компенсация основного возмущения. Недостаток: 1. Отсутствие информации с выхода системы на ее вход. 2. Требуется большое количество датчиков для измерения различных возмущений. Билет №2 Основные понятия и определения теории автоматического управления. Системы управления относятся к кибернетическим системам, так как в основу их положен принцип переработки информации. Кибернетика — это наука, которая изучает общие законы управления в разных системах: технических, биологических, экономических на основе переработки информации в системах различной природы — машине, обществе, животном. Управление реализуется целенаправленной координацией деятельности (действия) различных элементов той или иной системы. Кибернетику подразделяют на три вида: техническая кибернетика, экономическая кибернетика и биокибернетика. Техническая кибернетика изучает технические средства (роботы и другие технические устройства), способные заменить человека при управлении трудоемкими технологическими процессами или операциями на производстве. Автоматические и автоматизированные системы управления являются элементами технической кибернетики. В основе всех процессов управления находятся информационные процессы, происходящие в системе. Кибернетика изучает общие принципы и законы управления различными объектами на основе получения, хранения, переработки и передачи информации. Каждый управляемый объект рассматривается как отдельная система. Система — это совокупность элементов, находящихся в отношениях и связях друг с другом, которая образует определенную целостность и единство. Каждая система может состоять из ряда подсистем. Подсистемой называется часть системы, выделенная по определенному признаку. Подсистему, в свою очередь, можно рассматривать как систему по отношению к ее внутренним элементам. Например, пищевая промышленность является системой, в которую входят отдельные элементы системы (отрасли): хлебопекарная, сахарная, пивоваренная, масло-жировая и т. д., обладающие общим для всех свойством — способностью удовлетворять потребности людей в продуктах питания. В свою очередь, отрасль можно рассматривать как систему, состоящую из совокупности элементов, которыми являются предприятия (объединения). Любая кибернетическая система состоит из двух подсистем: управляющей и управляемой. Управляющей называется подсистема, которая реализует процесс переработки информации, воспринимая информацию, характеризующую состояние системы, перерабатывая и генерируя новую информацию. Управляемой является подсистема, которая под действием данной информации реализует процессы функционирования всей системы. Система управления представляет собой единство управляющей и управляемой подсистем (рис. 2.1).
Простые системы — это системы, не имеющие разветвленной структуры (отсутствуют иерархические уровни), с небольшим количеством взаимосвязанных и взаимодействующих элементов, выполняющих более сложные функции. При этом изменения в них легко описываются. Сложные системы — это системы с разветвленной структурой и значительным количеством взаимосвязанных и взаимодействующих элементов, выполняющих более сложные функции. Очень сложные системы — это такие системы, состояние которых по различным причинам до сих пор не удается подробно описать (пример — Солнечная система в мировом пространстве). Связью в кибернетике являются процессы получения информации, ее хранения и передачи. Различают два вида связи: прямую и обратную.
Обратная связь — связь, позволяющая осуществить выбор управляющего воздействия в зависимости от состояния системы (рис. 2.3). Элемент А связан каналами прямой и обратной связи с элементом В. По каналу обратной связи элемент А получает информацию об изменениях, происходящих в элементе В в результате влияния полученной от А информации. Таким образом, с помощью обратной связи получают сведения о результатах управляющих и внешних возмущениях на объект, при этом обеспечиваются необходимые воздействия входных и выходных сигналов. 2. И – регуляторы. И – регулятором называется такой регулятор, у которого скорость перемещения РО пропорционально отклонению регулируемого параметра от заданного значения. Передаточная функция И – регулятора
где У И – регулятора нет жесткой зависимости между отклонением регулируемой величины и положением РО. В момент прекращения работы АР регулирующий орган может занимать любое положение в пределах возможного диапазона перемещений. Основное достоинства И – регуляторов отсутствие остаточного отклонения регулируемой величины по окончании процесса регулирования. Это объясняется тем, что регулирующее воздействие регулятора на объект прекращается в тот момент, когда отклонение регулируемой величины от заданного значения становится равным нулю. Недостатком И – регулятора является относительно низкая скорость, которая характеризуется значением параметра настройки регулятора
|
 Кибернетические системы можно подразделить на простые, сложные и очень сложные.
Кибернетические системы можно подразделить на простые, сложные и очень сложные.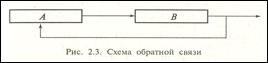
 Прямая связь — связь, определяющая воздействие на объект управления, вид соединения элементов системы управления, при котором входное воздействие элемента А передается на вход какого кого-либо элемента В (рис. 2.2). При управлении необходимо знать, как реагирует на управляющий сигнал объект управления, т. е. необходима обратная связь В с А.
Прямая связь — связь, определяющая воздействие на объект управления, вид соединения элементов системы управления, при котором входное воздействие элемента А передается на вход какого кого-либо элемента В (рис. 2.2). При управлении необходимо знать, как реагирует на управляющий сигнал объект управления, т. е. необходима обратная связь В с А. или
или  (12.3)
(12.3) (12.4)
(12.4) = 1/Ти параметры настройки И – регулятора, Ти - постоянная интегрирования
= 1/Ти параметры настройки И – регулятора, Ти - постоянная интегрирования


