
МОСКОВСКИЙ ОРДЕНА ЛЕНИНА, ОРДЕНА ОКТЯБРЬСКОЙ РЕВОЛЮЦИИ И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ИМЕНИ Н.Э. БАУМАНА
Лабораторная работа по курсу «Конструирование гироприборов. Расчет их элементов и механизмов».
ОПРЕДЕЛЕНИЕ КИНЕМАТИЧЕСКОЙ ПОГРЕШНОСТИ ПРОГРАММНОГО МЕХАНИЗМА.
Москва, 2015
Цель работы: целью настоящей лабораторной работы является ознакомление с назначением, принципом действия и конструкцией программного механизма прибора «Гирогоризонт». В работе рассматривается одна из конструкций безкулачкового программного механизма и экспериментально определяется его кинематическая погрешность.
Программный механизм прибора «Гирогоризонт», представляющего собой свободный трехстепенный гироскоп, служит вместе с другими органами управления движением ракеты на активном участке траектории для; управления ракетой по углу тангажа по заданной программе. Кроме того сигналы с программного механизма прибора используются для стабилизации движения ракеты вокруг центра масс по углу тангажа в плоскости стрельбы.
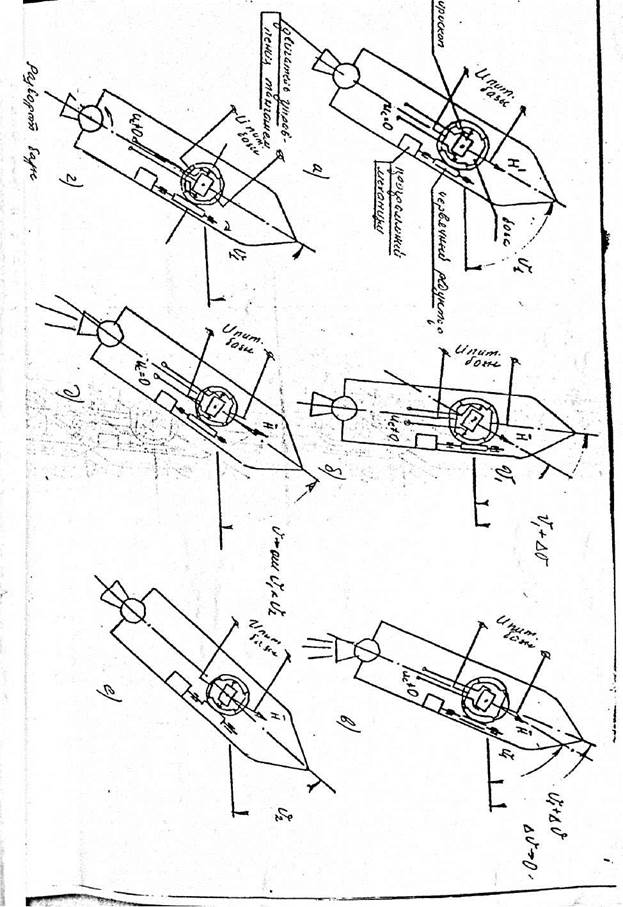
Принцип действия программного механизма в приборе «Гирогоризонт». (Рис. 1) Пусть ракета летит с заданным углом тангажа Ɵ (Рис. 1а). Гирогоризонт состоит из трехстепенного свободного гироскопа, с которым связаны щетки потенциометров базы. База представляет собой барабан с укрепленными на нем двумя потенциометрами, включенными по мостовой схеме, связанный через червячный редуктор программного механизма с корпусом прибора (и, следовательно, с ракетой). На рис.1а щетки расположены симметрично относительно потенциометров базы и с них в этом положении на органы управления ракетой снимается сигнал Uc, равный 0 (нулю). Теперь пусть ракета под действием тех или иных сил повернулась на угол тангажа ΔƟ (Рис.1а)
В этом случае потенциометры базы вместе с ракетой по
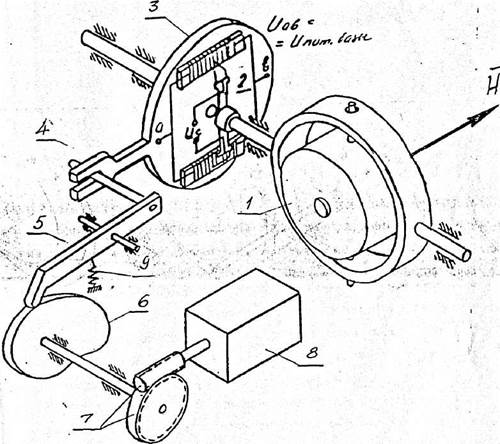
Кулачковые программные механизмы. Условная кинематическая схема кулачкового программного механизма изображена на рис. 2. База с потенциометрами (3) поворачивается рычагом (5) через поводок (4) по заданной программе, которая задается с помощью кулачка (6) Потенциометры базы соединены по мостовой схеме и запитываются напряжением постоянного тока, которое подводится к точкам «а» и «б». Щетки (2) потенциометров базы жестко связаны с трехстепенным свободным гироскопом (1). Кулачок,задающий программный угол разворота ракеты по тангажу, приводится во вращение шаговым двигателем (8) через червячный редуктор. Для того, чтобы выбрать люфт в кинематической схеме программного механизма рычаг (5) прижимается кулачку (6) пружиной (9). Кинематика кулачковых программных механизмов довольно проста, однако они имеют один существенный недостаток. Такой программный механизм обеспечивает полет ракеты лишь по одной единственной программе, а именно по той, которая соответствует профилю кулачка. Этого недостатка лишены бескулачковые программные механизмы.
Бескулачковые программные механизмы.
Программный механизм предназначен для разворота базы прибора, на которой установлены потенциометры, по заданному закону с целью управления полетом ракеты по тангажу. Механизм представляет собой устройство бескулачкового типа, состоящее из программных приводов, барабана с потенциометрическими датчиками и двигателя с редуктором, который, работая в тормозном режиме, накладывает постоянный момент на барабан для выбирания люфтов программного механизма.
Под кинематической погрешностью программного механизма понимают точность соответствия действительного углового поворота базы расчетному при заданном числе импульсов, подаваемых на шаговый двигатель программного механизма. Кинематическая погрешность программного механизма Таким образом, кинематическая погрешность программного механизма Az может быть записана в виде: Суммарная кинематическая погрешностьцепи «шаговый двигатель - колесо z=152» складывается из следующих величин: а) кинематическая погрешность каждой пары цепи, определяемая погрешностью зубчатых колес пары
где: F - допуски на кинематическую погрешность колес пары в микронах: m - модуль: z - число зубьев ведомого колеса пары.
б) кинематическая погрешность
где: Е1 и Е2 - суммарные радиальные биения зубчатых колес пары (от радиальных биений валиков и колец шарикоподшипников).
Величины
Суммарная кинематическая погрешность пары должна быть приведена к выходному валику кинематической цепи по формуле:
где i- передаточное отношение между ведомым валиком i-ой пары и ведомым валиком всей кинематической цепи. Окончательно кинематическая погрешность кинематической цепи «двигатель - колесо z=152» определяется выражением:
Из других факторов, влияющих на кинематическую погрешность программного механизма следует отметить механические деформации цепи в результате нежесткости, температурные деформации и поворот механизма по инерции. Кинематическая погрешность, определяемая неточностью изготовления зубчатых колес и валиков кинематической цепи, может быть предварительно подсчитана и в последствии учитываться при задании программы разворота базы.
ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ
|
 Кинематическая схема бескулачкового программного механизма представлена на рис. 3.
Кинематическая схема бескулачкового программного механизма представлена на рис. 3.
 =
=  ,
, - суммарная кинематическая погрешность цепи «шаговый
- суммарная кинематическая погрешность цепи «шаговый величина мёртвого хода кинематической цепи.
величина мёртвого хода кинематической цепи. которая может быть определена по формуле:
которая может быть определена по формуле:
 , определяемая радиальными биениями валиков и вращающихся колец шарикоподшипников
, определяемая радиальными биениями валиков и вращающихся колец шарикоподшипников
 и
и  , которая определяется по формуле:
, которая определяется по формуле:








