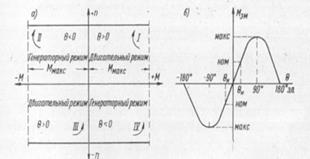
Механическая и угловая характеристики синхронных электродвигателейСинхронные двигатели начинают широко внедрять в строительное производство, применяя их для привода машин средней и большой мощности, не требующих регулирования скорости: компрессоров, насосов, камнедробилок, экскаваторов. Синхронный двигатель имеет неизменную скорость вращения, поэтому его механическая характеристика представляет прямую линию, параллельную оси абсцисс. В квадранте координатной системы она характеризует двигательный, а в квадранте — генераторный режим (рис. 35,а).
Рис. 35. Механическая и угловая характеристики синхронного двигателя Синхронный двигатель обладает абсолютно жесткой механической характеристикой. Однако его момент не может иметь беспредельно большого значения. При некотором предельном или максимальном значении нагрузочного момента синхронный двигатель выходит из устойчивой синхронной работы и останавливается. При увеличении нагрузки синхронного двигателя ротор его начинает отставать от поля статора, угол внутреннего сдвига фаз © при этом возрастает. Увеличению угла © соответствует рост момента синхронного двигателя. Однако при возрастании до значений, больших момент начинает уменьшаться и становится возможным выпадение из синхронизма и остановка двигателя. Синхронный двигатель может работать и генератором с отдачей энергии в сеть при синхронной скорости, когда нагрузочный момент на его валу будет иметь отрицательное значение. Такой режим используется в сетевых двигателях преобразовательной группы системы Г—Д. Для целей торможения такой режим практического значения не имеет, поскольку при этом нельзя получить снижения скорости. Торможение синхронных двигателей противовключе-нием практически не применяется из-за больших толчков тока и усложненной аппаратуры управления. Вместо этого обычно применяют динамическое торможение. При динамическом торможении синхронного двигателя к кольцам ротора подводится постоянный ток, а обмотка статора замыкается на сопротивление. Механические характеристики синхронного двигателя в этом режиме будут подобны характеристикам асинхронного двигателя при динамическом торможении. Современные синхронные двигатели имеют в роторе кроме нормальной рабочей обмотки, питаемой постоянным током, еще и специальную пусковую короткозам-кнутую обмотку. С помощью этой обмотки двигатель пускается в ход как асинхронный, поэтому в пусковых режимах он обладает асинхронной характеристикой. Хотя синхронный двигатель является несколько более сложной машиной, чем асинхронный двигатель с ко-роткозамкнутым ротором (из-за наличия у первого возбудителя, колец и щеточного устройства), тем не менее он применяется очень широко, заменяя асинхронный электродвигатель. Объясняется- это главным образом тем, что синхронный двигатель может работать с опережающим cos ф, отдавая в сеть реактивную мощность, необходимую для возбуждения асинхронных машин и трансформаторов. Тем самым повышается cos ф всего предприятия в целом и уменьшается мощность компенсирующих устройств. При значительной мощности синхронных двигателей в данной электроустановке от компенсирующих устройств можно полностью отказаться. Коэффициент полезного действия синхронных двигателей и надежность их выше, чем асинхронных, вследствие увеличенного зазора между статором и ротором и меньшей чувствительности к изменениям напряжения сети. Последнее обстоятельство вызывается тем, что момент асинхронного двигателя пропорционален квадрату напряжения сети, а момент синхронного — первой степени напряжения. Для уменьшения величины пусковых токов и связанного с ними снижения напряжения, особенно в сетях небольшой мощности, пуск синхронных двигателей осуществляется обычно через реактор, а в некоторых случаях— через автотрансформатор. Ограничение пусковых токов защищает обмотки двигателей от повышенных динамических нагрузок, возникающих при прямом включении в сеть. Увеличение cosY: Активная мощность таких потребителей при заданных значениях тока и напряжения зависит от cosφ: P = UICosφ, I = P / UCosφ Снижение коэффициента мощности приводит к увеличению тока. Косинус фи особенно сильно снижается при работе двигателей и трансформаторов вхолостую или при большой недогрузке. Если в сети есть реактивный ток мощность генератора, трансформаторных подстанции и сетей используется не полностью. С уменьшением cosφзначительно возрастают потери энергии на нагрев проводов и катушек электрических аппаратов. Коэффициент мощности показывает, как используется номинальная мощность источника. Следовательно, повышение коэффициента мощности увеличивает степень использования мощности генераторов. Для повышения коэффициента мощности (cosφ) электрических установок применяют компенсацию реактивной мощности. Увеличения коэффициента мощности (уменьшения угла φ - сдвига фаз тока и напряжения) можно добиться следующими способами: 1) заменой мало загруженных двигателей двигателями меньшей мощности, 2) понижением напряжения 3) выключением двигателей и трансформаторов, работающих на холостом ходу, 4) включением в сеть специальных компенсирующих устройств, являющихся генераторами опережающего (емкостного) тока. На мощных районных подстанциях для этой цели специально устанавливают синхронные компенсаторы - синхронные перевозбужденные электродвигатели.
|