Определение путевой скорости
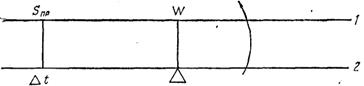
При полете от радиолокатора и на радиолокатор путевая скорость определяется в следующем порядке: 1. Запросить у диспетчера место воздушного судна и заметить время. 2. Через 5—7 мин полета снова запросить место воздушного судна и заметить время. 3. Определить пройденный путь воздушного судна как разность между полученными дальностями: S пр=Д2 — Д1 или S пр = Д1 — Д2 (при полете на радиолокатор). 4. По полученному расстоянию и времени полета рассчитать на навигационный линейке путевую скорость (рис. 42).
Рис. 42. Расчет путевой скорости
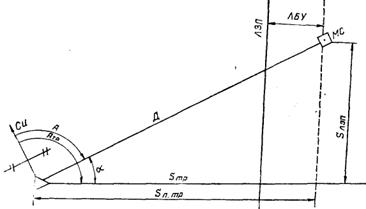
Контроль пути при пролете от радиолокатора производится в такойпоследовательности: 1. Запросить у диспетчера место воздушного судна. 2. Перевести полученный азимут в МПС, сравнить его с ЗМПУ и определить боковое уклонение: МПС = А — (± ΔМ); БУ = МПС - ЗМПУ; где ΔМ — магнитное склонение. 3. Рассчитать поправку в курс и взять курс следования в КПМ (ППМ): ПК = БУ+ДП; МКкпм = МКР — (± ПК). Контроль пути по направлению и дальности может осуществляться с помощью боковых радиолокаторов нанесением на карту места воздушного судна по переданным на борт азимуту и дальности. Такой контроль можно осуществлять и без прокладки азимута и дальности на карте, что сокращает время на получение необходимых данных контроля пути, повышает точность определения положения воздушного судна относительно ЛЗП, а следовательно, и точность определения навигационных элементов. При использовании боковых радиолокаторов для контроля пути по направлению и дальности без прокладки на карте пеленга и дальности необходимо: 1. При подготовке карты к полету нанести на ЛЗП точку траверза от бокового радиолокатора, измерить расстояние по линии траверза от радиолокатора до ЛЗП и определить азимут точки траверза по формуле: Атр = ЗМПУ ± 90°. Знак «плюс» берется, когда радиолокатор слева, а знак «минуc» — когда радиолокатор справа от ЛЗП.
Рис. 43. Контроль пути по направлению и дальности
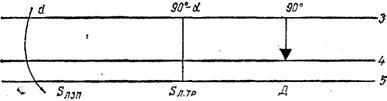
2. В полете, когда необходимо проконтролировать путь по направлению и дальности (рис. 43), запросить у диспетчера место воздушного судна и определить угол а по формуле: α = Атр — А или α = А — Атр. 3. Рассчитать на навигационной линейке расстояние по ЛЗП от воздушного судна до точки траверза и расстояние от радиолокатора по линии траверза (рис. 44). 4. Определить сторону и величину линейного бокового уклонения по формулам: ЛБУ = S л.тр— S тр (радиолокатор расположен слева от ЛЗП); ЛБУ = S тр — S л.тр (радиолокатор расположен справа от ЛЗП);
Рис 44. Расчет расстояния по ЛЗП от ВС до точки траверза и расстояния от радиолокатора по линии траверза
Комплексное использование средств самолетовождения Для того чтобы добиться высокой точности и безопасности самолетовождения, все имеющиеся средства, как самолетные, так и наземные, должны использоваться в комплексе. Анализ случаев потерь ориентировки и нарушений режимов полета свидетельствует о том, что основной причиной ухода воздушного судна с установленной трассы является невыдерживание курса следования, соответствующего заданным магнитно-путевым углам участков трасс. Причины этого заключаются в следующем: — спрямление маршрута; — отказ курсовых приборов и несвоевременное определение этого отказа; — неграмотная эксплуатация курсовых приборов и др. Поэтому использованию в полете курсовых приборов необходимо придавать первостепенное значение. Согласование курсовой системы должно производиться в строго определенном порядке. Значение магнитно-путевого угла каждого участка трассы, снятого с полетной карты, устанавливается против треугольного индекса КППМС. После каждого изменения курса следования необходимо проверять соответствие курса системы ГМК-1Г показаниям магнитного компаса КИ-13 и ЗМПУ.
Правильность показаний курсовой системы можно также проверять в полете сравнением взаимного расположения радиолокационных ориентиров на экране самолетного радиолокатора с расположением этих ориентиров относительно ЛЗП (обзорно-сравнительный способ). Это позволит своевременно определить возможный отказ курсовой системы. В полете необходимо контроль по направлению с помощью самолетного АРК дублировать контролем по направлению с помощью бортовой радиолокационной станции, запросом места воздушного судна у диспетчеров службы движения, визуально. Контроль пути по дальности должен осуществляться всеми имеющимися способами на каждом участке трассы: визуальным, с помощью самолетного радиолокатора и наземных радиолокационных станций. Необходимо своевременно вносить исправления в расчетное время пролета контрольных ориентиров (поворотных пунктов маршрута). В полете необходимо вести контроль за взаимным расположением воздушных судов путем прослушивания радиосвязи. Особое внимание обращать на участки, где имеются пересечения нескольких воздушных трасс. Выдерживание высот по барометрическим высотомерам при полетах в районе аэродрома контролируется по радиовысотомеру. Выполнение этих требований повышает безопасность самолетовождения. При выполнении полета по ранее намеченному маршруту заполняются только графы «Время», «Курс», «Высота полета» раздела «Выполнение полета». В случаях отклонения от установленного маршрута (обход грозы, изменение маршрута по указанию диспетчера и т. д.) все данные, характеризующие фактическое положение воздушного судна по времени и месту, отмечаются в графе «Для заметок» (изменение курса, высоты полета, контроль по направлению и дальности, расчет навигационных элементов и т. д.).
|