Исследование динамического торможения ДПТ НВ
2.1. Собрать схему подключения широтно-импульсного преобразователя (ШИП) и инвертора (И) к сети переменного тока (рисунок 4)
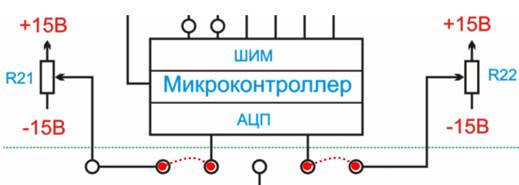
Рисунок 4 – Схема подключения ШИП и И к трехфазному источнику с организацией общей сети постоянного тока 2.2. Собрать схему подключения напряжения задания для ШИП (рисунок 5)
Рисунок 5 – Схема подключения задания для ШИП 2.3. Собрать схему подключения напряжения задания для И (рисунок 6)
Рисунок 6 – Схема подключения задания для И
2.4. С помощью перемычек собрать схему (Рисунок 7) для исследования режима динамического торможения ДПТ НВ, при этом в качестве резистора динамического торможения используются переменные резисторы R1,R2,R3, включенные последовательно (Рисунок 8). Якорь двигателя ДПТ НВ замкнут на сопротивление динамического торможения, а обмотка возбуждения подключена к ШИП возбуждения.
Рисунок 7 – Схема подключения ДПТ НВ для исследования режима динамического торможения
Рисунок 8 – Переменные резисторы на панели универсального стенда
2.5. Установить требуемое значение сопротивления динамического торможения (резисторы R1,R2,R3).
2.6. Подключить стенд к трехфазной сети (включить три автоматических выключателя, расположенных в левой нижней части стенда – надпись «Сеть»). Перед включением стенда необходимо убедиться, что все тумблеры, управляющие включением преобразователей, находятся в положении «выключено», а также на панели стенда присутствуют только необходимые для проведения данного опыта перемычки.
2.7. Включить ШИП возбуждения (тумблер в нижней части панели стенда, в окошке «Скважность (возбуждение), %») и резистором R22 установить номинальный ток возбуждения ДПТ НВ или заданный по прибору PA4.
2.8. Отключить ШИП возбуждения (тумблер в нижней части панели стенда, в окошке «Скважность (возбуждение), %») положение резистора R22 не изменять.
2.9. Подключить релейно-контакторную схему управления (включить тумблер SA70).
2.10. Выбрать режим работы инвертора (U-IR)/f = Const и резистором R31 задать частоту инвертора равной нулю прибор «Частота, Гц»
2.11. Подключить асинхронный двигатель АД КЗ к инвертору И, для этого предварительно тумблером SA71 задать схему включения обмоток статора АД КЗ «треугольник», затем с помощью магнитного пускателя K1 подключить АД КЗ к инвертору, нажав кнопку SB70 «Вперед».
2.12. Плавно увеличивая частоту инвертора (прибор «Частота, Гц») с помощью резистора R31 разогнать АД КЗ до угловой скорости, соответствующей номинальной угловой скорости ДПТ НВ (см. паспортные данные), контроль угловой скорости проводить по прибору BR1, рад/с.
2.13. Приступить к исследованию динамического торможения исследуемого двигателя ДПТ НВ.
2.14. Выбрать на панели РКУ режим релейно-контакторного управления (Rcu) и задать режим торможения РКУ и записи значений в память (см. раздел Работа платы РКУ).
2.15. Отключить асинхронный двигатель АД КЗ от инвертора нажав на панели управления кнопку SB71, одновременно включить ШИП возбуждения ДПТ НВ (тумблер в нижней части панели стенда, в окошке «Скважность (возбуждение), %»). ДПТ НВ перейдет в режим динамического торможения, при этом обмотка возбуждения будет подключена к ШИП возбуждения, а обмотка якоря будет замкнута на сопротивление динамического торможения (резисторы R1,R2,R3).
2.16. После останова двигатель (ДПТ НВ) отключить ШИП возбуждения (тумблер в нижней части панели стенда, в окошке «Скважность (возбуждение), %»).
2.17. Выбрать на панели РКУ режим просмотра значений торможения (см. раздел Работа платы РКУ) и просмотреть данные тока якоря, угловой скорости и времени, записанные в процессе торможения. Значения тока якоря, угловой скорости и времени (соответственно индикаторы 1, 3 и 4) занести в таблицу 2.
2.18. Повторить исследование режима динамического торможения ДПТ НВ для другого значения сопротивления динамического торможения, для этого выполнить все действия по п. 2.1 … 2.16, с той лишь разницей, что в п. 2.5 установить другое значение сопротивления динамического торможения.
2.19. Выбрать на панели РКУ режим просмотра значений торможения (см. раздел Работа платы РКУ) и просмотреть данные тока якоря, угловой скорости и времени, записанные в процессе торможения. Значения тока якоря, угловой скорости и времени (соответственно индикаторы 1, 3 и 4) занести в таблицу 3.
По завершении экспериментального исследования динамического торможения ДПТ НВ отключить стенд от сети (выключить автоматические выключатели, расположенные в левой нижней части стенда – надпись «Сеть») и снять установленные перемычки.
|