ING. WILTON EDIXON AGILA GALVEZESCUELA SUPERIOR POLITECNICA DEL LITORAL FACULTAD DE INGENIERIA EN ELECTRICIDAD Y COMPUTACION AUTOMATIZACIÓN INDUSTRIAL I PARALELO 1 IVÁN SALAZAR PRÁCTICA 2 FECHA DE ENTREGA DEL INFORME: 13/11/14 ING. WILTON EDIXON AGILA GALVEZ Objetivos: Automatizar un sistema de llenado de un tanque de agua (tanque con histéresis) con un PLC utilizando pulsadores.
Problema: Tenemos un depósito de agua como se muestra en la figura.
• Para controlar el sistema tenemos un selector de mando S6 de dos posiciones (M= manual, A= Automático) donde podemos escoger modo manual o modo automático. Para visualizar el modo tenemos la luz piloto H1 donde manual = 0 y automático = 1. • Se cuenta con un relé térmico que actúa en caso de calentamiento del motor, tanto en funcionamiento manual como en automático. Considere un contacto normalmente cerrado. • La luz piloto H2 indica que el sistema está en marcha (=1) o paro (=0), mientras tanto H3 indica la activación de la protección térmica (=1 cuando está activa). • Modo manual (s6 = M): la bomba trifásica (B) se enciende con el pulsador S4 y se apaga con el pulsador S5. En este modo de operación las boyas de nivel no intervienen. • Modo automático (s6 = A): El nivel debe mantenerse entre las dos boyas. Cuando el agua llegue al nivel abajo (S2) se pondrá en marcha la bomba, y cuando el agua llegue al nivel alto (S1) se detendrá la bomba. • El control debe permitir hacer el cambio de manual a automático sin afectar el estado actual de la bomba. • Realice el diagrama de conexiones, programa de control en el PLC y diagrama de fuerza de para el sistema mostrado. Planteo y solución:
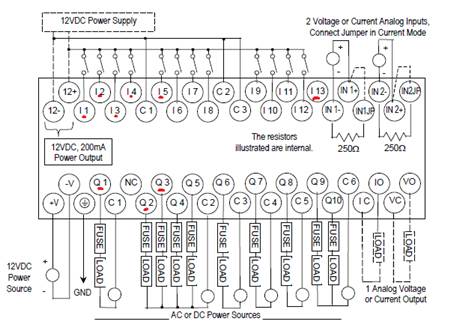
Comencemos por la parte automática, el planteo fue el siguiente:
Como podemos ver en el estado intermedio, cuando la boya
Este circuito nos permite guardar un dato tipo flip-flop, dado que Para modo manual es muy parecido al modo automático, solo que una entrada no es NC y ambas son pulsadores.
Lo demás solo es estética del problema, solo tenemos que nombrar con un mismo nombre los contactores para los indicadores como marcha-paro, manual, automático, y relé-térmico. Para la parte del contactor térmico solo se lo puso como interruptor general y es NC.
Problema resuelto Para la parte manual se tomó como pulsador de marcha Para la parte de intercambio de manual a automático Para el indicador de marcha-paro se tomó a Para el indicador de manual auto se tomó a Para el indicador de protección térmica se tomó a
Las que están marcadas con rojo se utilizaron
Conclusión y Recomendación: Se pudo automatizar y dar a elección del usuario cambiar en modo manual el automatismo que acabamos de diseñar sin alterar el estado en el que se encuentra la bomba con todos los indicadores para visualizar el proceso que se lleva a cabo. Recomiendo que se aplique alguna analogía con bi-estables dado que el problema de llenado se lo puede resolver con un diseño de flip-flop, o también guardar datos como en un registro.
|



 esta apagada y
esta apagada y  esta prendida, en el estado de vaciado la bomba está apagada pero en el estado de prendido pues la bomba esta prendida, no podemos aplicar algebra de Boole, así que debemos aplicar un tipo de pulsador.
esta prendida, en el estado de vaciado la bomba está apagada pero en el estado de prendido pues la bomba esta prendida, no podemos aplicar algebra de Boole, así que debemos aplicar un tipo de pulsador.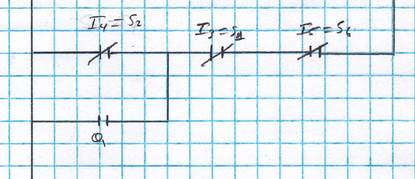
 se activa cuando la bomba se enciende hasta terminar de llenarse el tanque.
se activa cuando la bomba se enciende hasta terminar de llenarse el tanque.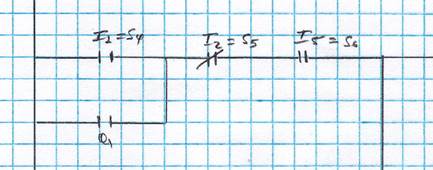

 a
a  y a
y a  como
como 
 es
es 
 como
como  como
como 
 como
como