СИСТЕМА ПОДВИЖНОГО УПОРА УПРАВЛЕНИЯ СПУУ-52
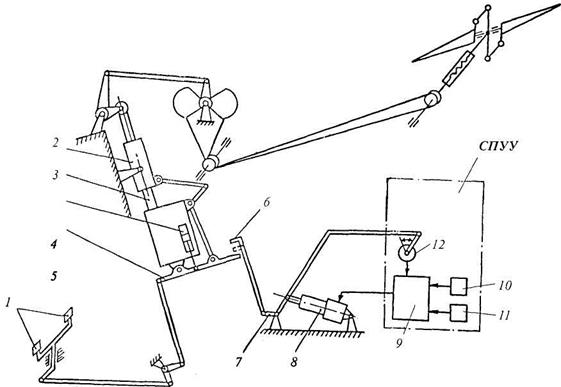
Система подвижного упора управления СПУУ обеспечивает автоматическое ограничение максимального угла установки лопастей рулевого винта в зависимости от плотности воздуха для предохранения рулевого винта и трансмиссии от перегрузок при маневрировании. При низком атмосферном давлении и плюсовых температурах наружного воздуха допустимый шаг винта увеличивается, а при высоком давлении и низких температурах -уменьшается. При комплектации вертолета двигателями ТВЗ-117МТ используется система СПУУ-52-1, при установке двигателей ТВЗ-117ВМ - система СПУУ-52. Система СПУУ представляет собой релейную следящую систему постоянного тока, выходной шток исполнительного механизма МП-100М сер.2 которой перемещает подвижной упор, ограничивающий перемещение правой педали управления шагом рулевого винта вертолета. Отработка выходного штока производится по сигналам чувствительных элементов - измерительного комплекса давления ИКД-27Да-400-830 и приемника температуры П-1. В комплект СПУУ входят: блок управления БУ-32 (БУ-32-1) (установлен на центральном пульте), комплекс ИКД-27Да-400-830 (установлен пол полом кабины пилотов и подсоединен к системе ПВД), приемник П-1 (установлен между воздухозаборниками двигателей). Механизм подвижного упора включает в себя электромеханизм МП-100М 2 серии, узел качалки с пружинным упором и микровыключателем АМ-800К, тягу с ограничительной муфтой, датчик обратной связи ДОС с тандером и пружиной. Механизм подвижного упора установлен в редукториом отсеке и закреплен на стенке расходного топливного бака. Электромеханизм МП-100М 2-й серии срабатывает от сигнала системы СПУУ. 1. 1 - педали путевого управления 7 - качалка 2 - гидроусилитель сер. 8 - электромеханизм МП-100М 2 3 - шток гидроусилителя 9 - блок управления БУ-32 (БУ-32-) 4 - золотник гидроусилителя 10 - ИКД-27Да-400-830 5 - рычаг управления золотником гидроусилителя 11 - приемник П-1 6 - подвижной упор 12 - датчик обратной связи (ДОС) Рис. 00. Схема работы СПУУ
При атмосферном давлении 760 мм.рт.ст. и температуре наружного воздуха + 10° С шток электромеханизма находится в среднем положении. При полностью убранном штоке МП-100М подвижной упор не ограничивает угол установки лопастей рулевого винта - он составляет 22°45\..23°30\ При полностью выдвинутом штоке качалка поворачивается и ее пружинный упор ограничивает перемещение тяги, а следовательно, и максимальный угол винта до 17°2(У ± 25\ Таким образом, повышение давления и понижение температуры ограничивает шаг рулевого винта на 80% максимального значения. Управление штоком осуществляется в соответствии с законом: ip-(P - Ро) + it -(t - to), где ip, it- передаточные числа рычага датчика обратной связи по давлению и температуре; Ро, to- начальные условия: Ро= 760 мм.рт.ст. для СПУУ-52 и для СПУУ-52-1; to= +10 °С для СПУУ-52, to= -15 °С для СПУУ-52-1; Р, t - текущие значения давления и температуры. Передаточное число ДОС по температуре: - СПУУ-52 - 1,05 ± 0,42 (% хода ДОС/°С); - СПУУ-52-1 - 0,9 ± 0,27 (% хода ДОС/°С); - СПУУ-52 - 0,28 ±0,11 (% хода ДОС/мм.рт.ст.); - СПУУ-52-1 - 0,24 ± 0,08 (% хода ДОС/мм.рт.ст.); Питание СПУУ через осуществляется постоянным током напряжением (27 ± 2,7) В и переменным током напряжением 36 В 400 Гц. В кабине пилотов на правой панели АЗС установлен АЗС «СПУУ-52», на левом электрощитке - выключатель «СПУУ-52», а на центральном пульте - блок управления БУ-32 (БУ-32-1). Блок управления БУ представляет пульт-вычислитель и предназначен для: - преобразования и усиления сигналов в соответствии с законом управления; - сигнализации отсутствия напряжений питания (горит красная кнопка-лампочка «ОТКЛ»); - визуальной индикации положения штока исполнительного механизма (индикатор нуля - планка индикатора перемещается влево с увеличением температуры или с уменьшением атмосферного давления); - обеспечения средствами встроенного контроля наземной проверки системы (нажимной переключатель «Р -1» и ручка «КОНТРОЛЬ»; - обеспечения необходимых подстроек параметров системы в эксплуатации.
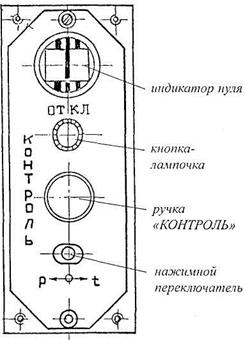
Рис. 00. Пульт управления БУП
При включении АЗС и выключателя на пульте БУ гаснет кнопка-лампочка, а планка индикатора планка занимает положение в соответствии с атмосферными условиями. При наземной проверке (педали управления рулевым винтом - нейтральны): -нажать кнопку-лампочку «ОТКЛ» и, удерживая ее, установить нажимной переключатель «Р - t» в положение «t» - планка индикатора должна перемещаться вправо; -отпустить переключатель и кнопку лампочку планка вернется в исходное положение; -нажать кнопку-лампочку «ОТКЛ» и, удерживая ее, установить нажимной переключатель «Р -1» в положение «Р» - планка индикатора должна перемещаться влево; -отпустить переключатель и кнопку-лампочку - планка вернется в исходное положение; -нажать кнопку-лампочку «ОТКЛ» и, удерживая ее, поворотом ручки «ОТКЛ» -установить планку индикатора в крайнее положение; -выключить выключатель «СПУУ-52» и отпустить кнопку-лампочку – лампа загорится, а планка должна переместиться в крайнее левое положение (то есть при выключении питания СПУУ система отрабатывает на снятие ограничения с управления рулевым винтом). -включить выключатель «СПУУ-52» - планка индикатора займет исходное положение.
|